Points are described with the help of X and Y coordinates (x, y). In computer graphics, points are the basic thing we have to deal with. Any object whether it is a two dimensional ( such as circle, square, rectangle ), or three dimensional (such as sphere, cone, cube ) etc, are described by a set of points through their surface. It is the collection of points that we trace to give the illusion of an object.
In three dimensional geometry a point has three coordinates (x, y, z). The point could be rotated, reflected, translated etc along with the object when translation is performed with the object.
The have written a class in java which contains the properties and basic methods that we need to simulate a point, and do most of the 3-d graphics works.
/**
*
* @author Rajan Prasad Upadhyay
* class RPoint.java
*/
public class RPoint {
public double x;
public double y;
public double z;
public RPoint(){}
public RPoint(double x,double y,double z){
this.x=x;
this.y=y;
this.z=z;
}
public void viewPoint(){
System.out.println("("+x+","+y+","+z+")");
}
public int getX(){
int i=(int)Math.rint(x);
return i;
}
public int getY(){
int i=(int)Math.rint(y);
return i;
}
public int getZ(){
int i=(int)Math.rint(z);
return i;
}
public RPoint getRotateAlongTheta(int radius,double theta,RPoint center){
double tx=x-center.x,ty=y-center.y,tz=z-center.z;
double tx1,ty1,tz1;
tx1=tx*Math.cos(Math.toRadians(theta))-tz*Math.sin(Math.toRadians(theta));
tz1=tx*Math.sin(Math.toRadians(theta))+tz*Math.cos(Math.toRadians(theta));
tx=tx1+center.x;
tz=tz1+center.z;
RPoint p=new RPoint(tx,y,tz);
return p;
}
public RPoint getRotateAlongPhi(int radius,double phi, RPoint center){
double tx=x-center.x,ty=y-center.y,tz=z-center.z;
double tx1,ty1,tz1;
tx1=tx*Math.cos(Math.toRadians(phi))-tz*Math.sin(Math.toRadians(phi));
ty1=tx*Math.sin(Math.toRadians(phi))+tz*Math.cos(Math.toRadians(phi));
tx=tx1+center.x;
ty=ty1+center.y;
RPoint p=new RPoint(tx,ty,z);
return p;
}
//unit vectors
public double getL(){
double a=x/Math.sqrt(x*x+y*y+z*z);
return a;
}
public double getM(){
double a=y/Math.sqrt(x*x+y*y+z*z);
return a;
}
public double getN(){
double a=z/Math.sqrt(x*x+y*y+z*z);
return a;
}
//project coordiantes functions
public int getViewX(int cz){
int a=(int)Math.rint(cz*x/z);
return a;
}
public int getViewY(int cz){
int a=(int)Math.rint((cz)*y/z);
return a;
}
public int getViewZ(int cz){
int a=(cz);
return a;
}
//3d translations functions
public RPoint translate( RPoint p){
RPoint a=new RPoint(x-p.x,y=p.y,z-p.z);
return a;
}
public RPoint inverseTranslate( RPoint p){
RPoint a=new RPoint(x+p.x,y+p.y,z+p.z);
return a;
}
public void RotateAlongTheta( double theta, RPoint center){
double tx=(x-center.x)*Math.cos(Math.toRadians(theta))-(z-center.z)*Math.sin(Math.toRadians(theta));
double tz=(x-center.x)*Math.sin(Math.toRadians(theta))+(z-center.z)*Math.cos(Math.toRadians(theta));
x=tx+center.x;
z=tz+center.z;
}
public void RotateAlongPhi( double phi, RPoint center){
double tz=(z-center.z)*Math.cos(Math.toRadians(-phi))-(y-center.y)*Math.sin(Math.toRadians(-phi));
double ty=(z-center.z)*Math.sin(Math.toRadians(-phi))+(y-center.y)*Math.cos(Math.toRadians(-phi));
y=ty+center.y;
z=tz+center.z;
}
public RPoint RotateAlongX(int theta, RPoint center){
//x does not change
double tz=(z-center.z)*Math.cos(Math.toRadians(-theta))-(y-center.y)*Math.sin(Math.toRadians(-theta));
double ty=(z-center.z)*Math.sin(Math.toRadians(-theta))+(y-center.y)*Math.cos(Math.toRadians(-theta));
return new RPoint(x,ty+center.y,tz+center.z);
}
public RPoint RotateAlongY( int theta, RPoint center){
//ie rotating along y axix , clockwise
double tx=(x-center.x)*Math.cos(Math.toRadians(theta))-(z-center.z)*Math.sin(Math.toRadians(theta));
double tz=(x-center.x)*Math.sin(Math.toRadians(theta))+(z-center.z)*Math.cos(Math.toRadians(theta));
return new RPoint(tx+center.x,y,tz+center.z);
}
public RPoint RotateAlongZ(int theta, RPoint center){
//z constant
double tx=(x-center.x)*Math.cos(Math.toRadians(theta))-(y-center.y)*Math.sin(Math.toRadians(theta));
double ty=(x-center.x)*Math.sin(Math.toRadians(theta))+(y-center.y)*Math.cos(Math.toRadians(theta));
return new RPoint(tx+center.x,ty+center.y,z);
}
//prospective view coordinate giving functions
public void RevolveAlongY(double theta, RPoint sample){
double tx=(x-sample.x)*Math.cos(Math.toRadians(theta))-(z-sample.z)*Math.sin(Math.toRadians(theta));
double tz=(x-sample.x)*Math.sin(Math.toRadians(theta))+(z-sample.z)*Math.cos(Math.toRadians(theta));
x=tx+sample.x;
z=tz+sample.z;
}
public void RevolveAlongX(double theta, RPoint sample){
}
public RPoint getPerspective( RPoint viewPoint){
double xp=x-(-z)/(viewPoint.z-z)*(x-viewPoint.x);
double yp=y-(-z)/(viewPoint.z-z)*(y-viewPoint.y);
double zp=0;
return new RPoint(xp,yp,zp);
}
public RPoint rotateAlongY(double angle){
double x2=x*Math.cos(Math.toRadians(angle))-z*Math.sin(Math.toRadians(angle));
double y2=x*Math.sin(Math.toRadians(angle))+z*Math.cos(Math.toRadians(angle));
return new RPoint(x2,y2,z);
}
}
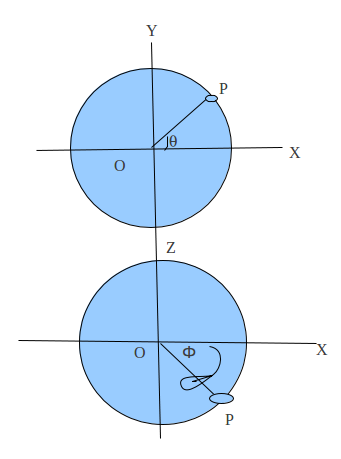
In my previous post, I have discussed about the angles (theta, phi ). Use them as a conventions for this post.
In the Next post , I will describe the complete process of actually drawing a three dimensional sphere in a frame or a window.